Étude d’un bras médical polyvalent.

Le bras robot a comme mission d’assister le personnel médical lors des chirurgies, quel que soit la zone à atteindre. Grâce à un scan préalable en trois dimensions du patient, le produit s’oriente avec précision dans l’espace, directement vers la zone à opérer. Il est de ce fait le moins invasif possible et limite les risques d’infections nosocomiales. Avec son porte-outil en extrémité, le bras peut se munir d’un guide pour percer, d’une scie pour découper, etc.
Le Projet :
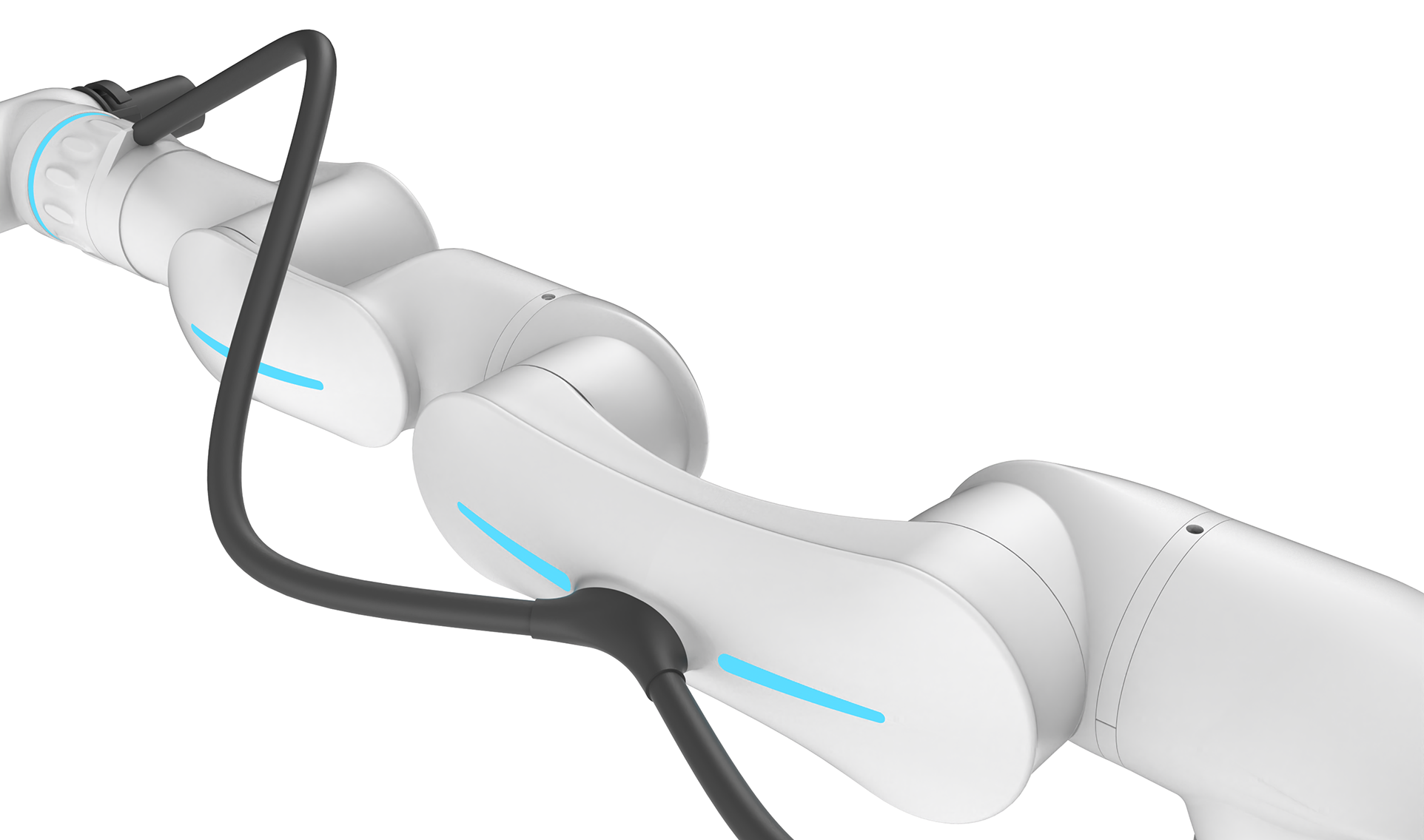
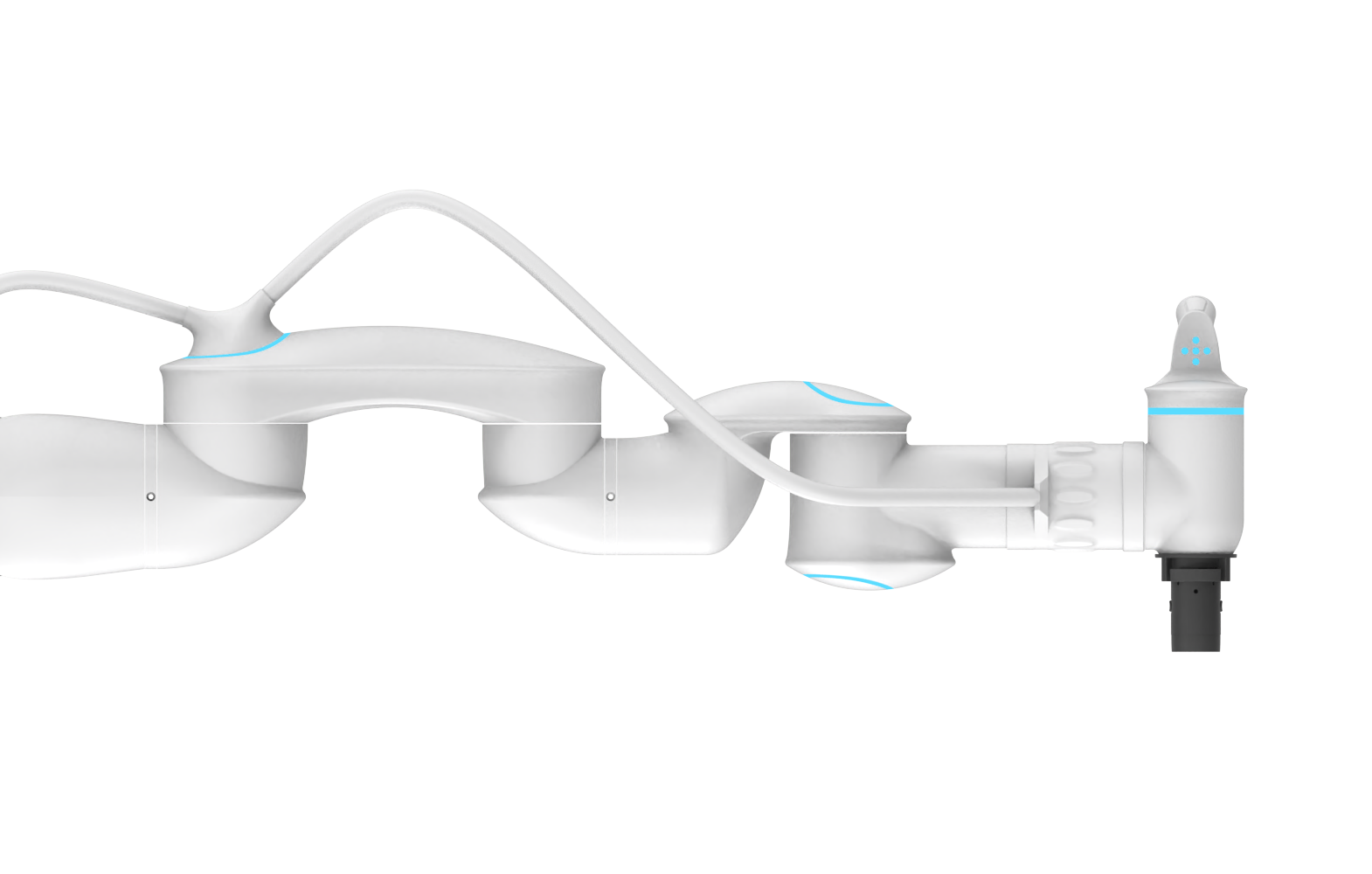
Ce travail sur un dispositif médical d’aide à la chirurgie a été réalisé en étroite collaboration avec les services techniques internes et externes, ingénieurs mécaniciens, informaticiens… D’un point-de-vue design, les défis majeurs étaient la réduction du nombre de vis apparentes, pour se distinguer d’une esthétique post-industrielle, améliorer la nettoyabilité comme la réduction de l’impact visuel global et créer d’une identité visuelle forte et spécifique. Le bras étant particulièrement long, nous avons ajouté des ruptures visuelles contrastées pour casser les volumes et segmenter sa linéarité. Nous avons en parallèle développé plusieurs scénarios de formes de signaux lumineux en visant une double fonction, à la fois signature visuelle et signal de sécurité. Ceux-ci sont repérables par l’ensemble des opérateurs quel que soit leurs positions et, à l’image des phares d’une voiture, ils distinguent le bras dès le premier coup d’œil.
Nous avons soumis trois scénarios d’avant-projets, selon trois univers distincts. Chacun mettait en valeur certaines notions du cahier des charges : Spline, l’avant-projet retenu, propose une image de sophistication très dessiné, avec des formes lisses ; Elbow tend vers l’organique et l’anthropomorphique, fait communique de la douceur ; Compass avait un objectif axé sur la didactique, avec une lisibilité forte et des formes structurées.
Une fois le scénario choisi, nous nous sommes lancés dans la recherche d’ergonomie du joystick, avec comme contrainte l’intégration d’une gâchette, de 5 boutons de direction et de 2 capteurs « homme-mort ». Plusieurs essais en maquette ont été nécessaire, en taillant des blocs de mousse dans un premier temps puis en imprimant des fichiers 3D. Nous avons conçu la préhension la plus confortable et surtout, la plus universelle. Droitier, gaucher, grande ou petite main, l’ensemble des commandes devant être accessibles dans n’importe quelle position d’opération tout en restant dans un volume très réduit.

Vous aimeriez aussi !



